ぐるぐるセブン 箪笥でGO

Nゲージにもどる
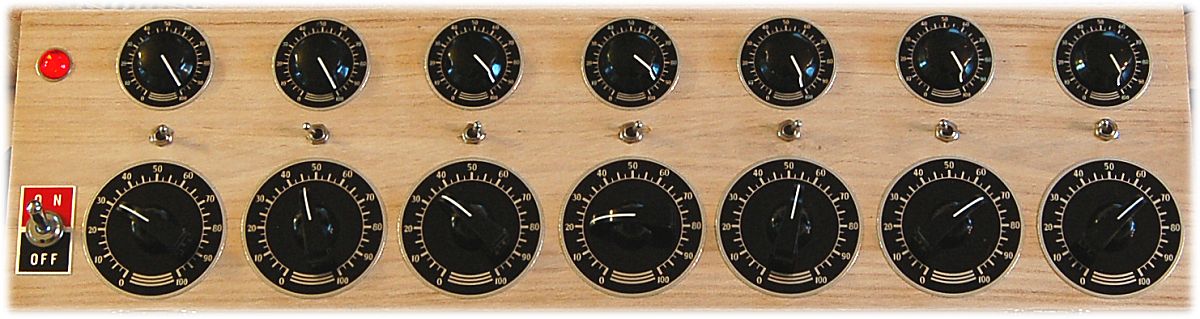
'10.04.16 桐箪笥型七連式PWM制御器と@0@7(ぐるぐるセブン)
'10.04.29 up 動画をYouTubeにUPしました。(クリックでYouTube移動します。)
'10.04.23 up PWM出力波形を追加しました。
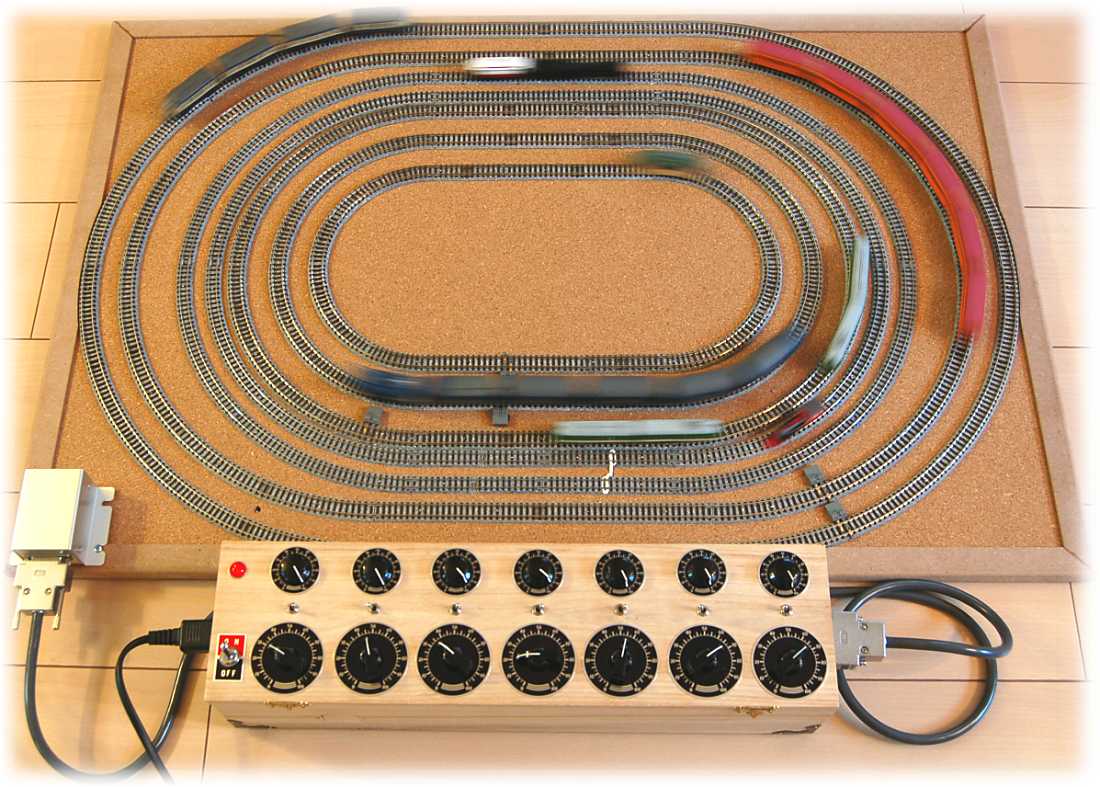
数ヶ月前に90x60cmのコルクボードに、Nゲージの線路:半径103,140,177,243,280(TOMIX)と、Zゲージの線路:半径195,220(プラスアップ)を貼り付けて7周のオーバル線路を作りました。
試走と走行可能な最小半径のテスト用に作ったのですが、いちいちフィーダーのケーブルをつなぎ換えるのが面倒なのと、7列車が同時に走行している光景を見たくて、このパワーパックを自作しました。
実際には、R195のZ線路とR177のN線路は直線部で道床同士がピッタリくっつくほど接近しており、車両限界が狭すぎてすれ違いや追い越し時に接触事故が多発してしまいます。
なので、同時に走行可能なのは6線までとなってしまいました。



箱はダイソーの工作用材料を使用しましたが、非常に柔らかくて加工が楽なのですが、簡単に傷がついてしまいます。
角を保護するために小箪笥用の金具を取り付け、上面を開けられるように蝶番と留め金具を取り付けたら、桐箪笥のような外見になってしまいました。
材料が柔いので長いネジを使ったため、蝶番の板が丸見えになる取り付け方になりました。(けっして面倒くさかったからではありません...)
蝶番や留め金具もつや消し黒にしたかったですね。
側面に丸カンの取っ手を付けるのもおもしろそうです。
ペコちゃんはスリムなので、ウエスタンリバー鉄道もどき機関車とすれ違う自信があるようです.......勇敢ですね。

お願い
このページは私個人が使用するために作ったパワーパックを紹介したものです。
閲覧してくれた方の参考になればとソースリストや回路図を公開していますが、その動作や安全性について当方は一切の責任を負えません事を御了承の上、御閲覧下さい。
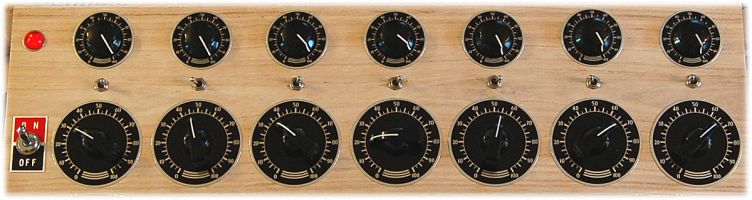
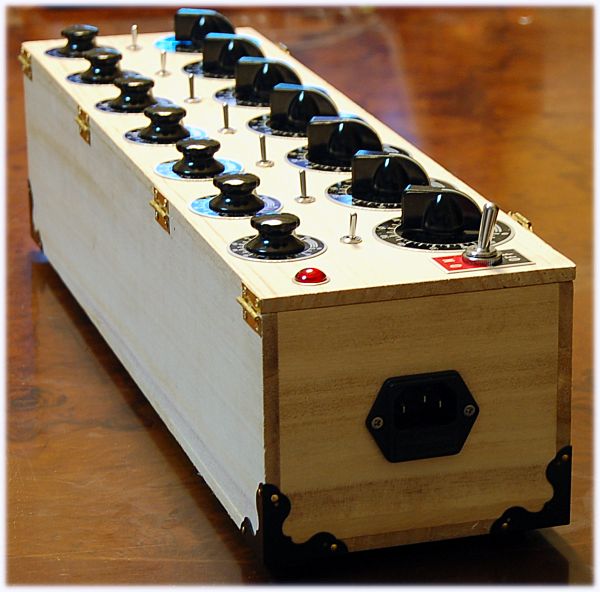
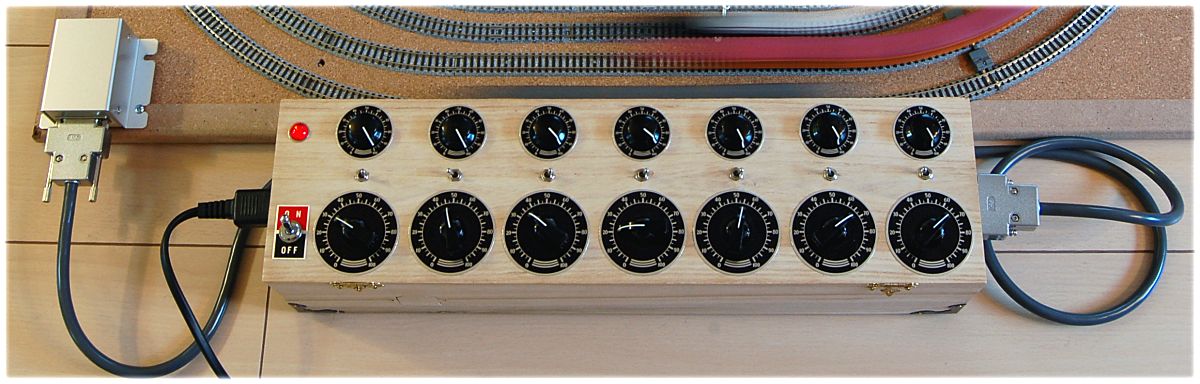
操作部について
左下のスイッチは電源スイッチです。その上のランプはパイロットランプで電源スイッチを投入すると点灯します。
上に並んでる7つの小さいツマミは振幅(電圧)調節用のボリュームです。
下に並んでる7つの大きいツマミがデューティー比調節ボリュームです。
その間に並んでる小さい7つのトグルスイッチは進行方向の切換用です。(左側=時計回り,中間=停止,右側=反時計回り)
小さくてレトロ感に乏しいスイッチですが、大量にあまっているので使いました。
ソフトウエアについて
CPU:PIC16F88
OSC:内蔵RCオシレータ8MHz
割り込み:50usecタイマー割り込み,A/Dコンバータ変換終了割り込み
PWMピリオド:128
PWM周波数:約156Hz(50usecX128=6.4msec=156.25Hz)
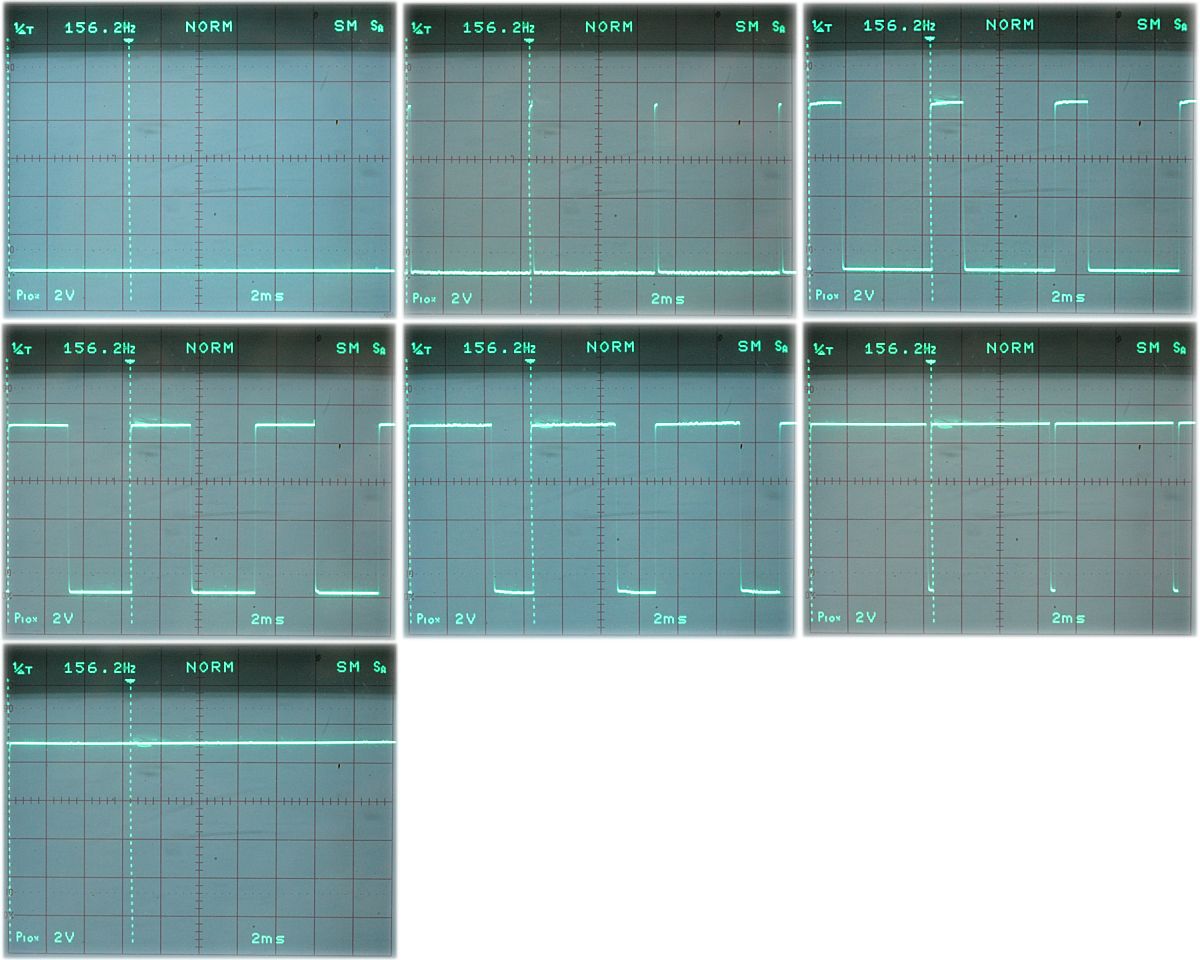
'10.04.23 up PWM出力波形を追加しました。
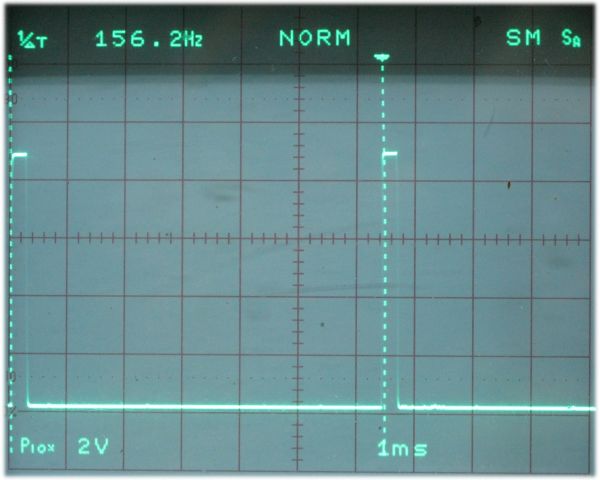
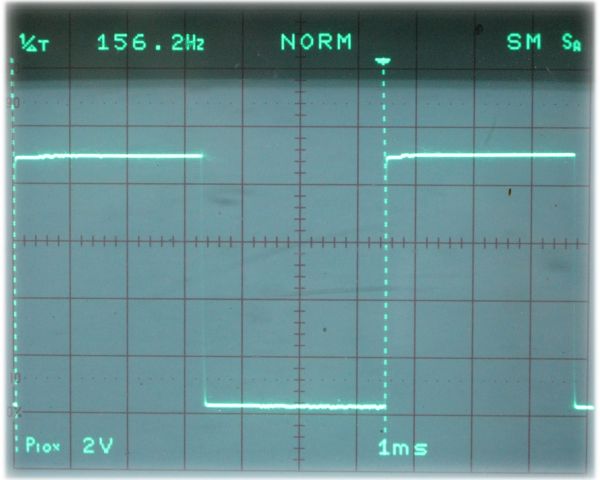
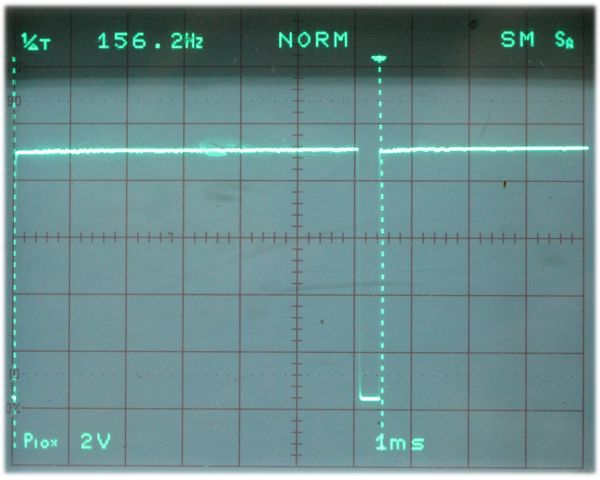
出力がOFFの時は、無負荷だとハイインピーダンス、モーター負荷では逆起電力やノイズの影響を受けてしまうので、1KΩの抵抗を負荷にして波形を観測しました。
左:低速時 中:デューティ比約50% 右:高速時
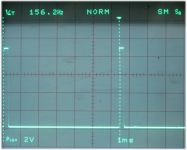
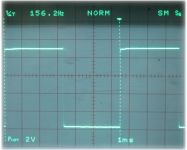
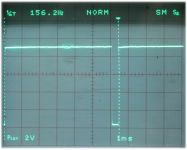
ボリューム絞りきった状態ではDC0V、徐々に回していくとONのパルス幅が徐々に広がっていき、最終的にDC出力になります。
この状態で振幅調整用のボリュームを使うと電圧制御になります。

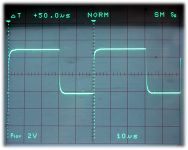
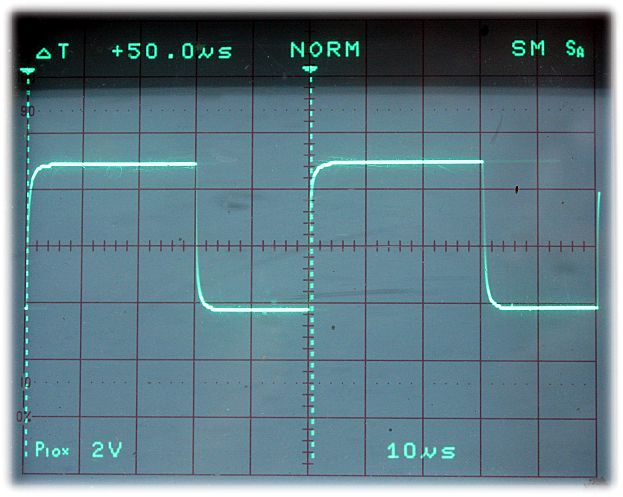
本プログラムの割込ルーチンの実行時間を計測した結果、タイマー割込は50usec間隔が限界と判断しました。
空きポートのRA7を出力に設定して、割り込みルーチンの先頭でHi,最後にLoにしてオシロスコープで計測してみました。
50usec中30usec、6割を割り込みルーチンが占めています。
デューティー比更新間隔:70msec(1チャンネルずつ、10msec間隔でA/D変換を行いますので、7chで70msecになります。)
A/Dコンバータの分解能は10bits=1024なので、1/8してPWMピリオドの7bits=128に合わせました。
プログラムの開発はMPLAB IDE v8.46(無料でダウンロード可)デバッガ兼書込器はPICKIT2を使用しました。
フローチャート(GIF) フローチャート(PDF)
ソースリスト HEXファイル
プログラムには使用していない変数やラベル,サブルーチンがあります。
ソースリストが文字化けしてしまう場合は、右クリックから「対象をファイルに保存」を選択してダウンロードしたファイルを開いてみてください。
ハードウエアについて
・モータードライバにTA8440HQを使用していますが、進行方向をソフトウエアで制御しない場合はフルブリッジである必要はありません。
TA8440HQは3Vくらいの電圧降下がありますので、振幅を12V付近まで取りたい場合は、15Vくらいの電源が必要になりますね。
当初は、16F887で進行方向もCPUで制御するつもりだったのでこのドライバを使いましたが、手動スイッチで進行方向を換える場合は電圧降下や発熱も抑えられるFETを使ったほうが良いと思います。
・保護回路は、定格500mA/遮断電流1Aのポリスイッチを使用しましたが、PWMなので、1Aでは遮断しない可能性があります。
これは、パワーパックの回路を保護する事が目的であり、線路上の模型の保護は期待できません。
・現状ではドライバとトランジスタにヒートシンクを付けていませんので、M車を何両も繋いだり、室内灯を組み込んだ長編製の列車を運転する場合は注意が必要です。
温度上昇の具合を見ながら、場合によっては放熱対策を施したいと思います。
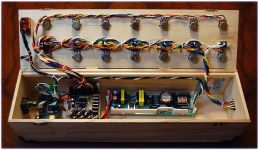
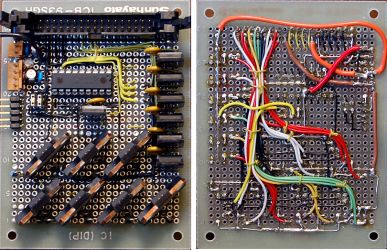
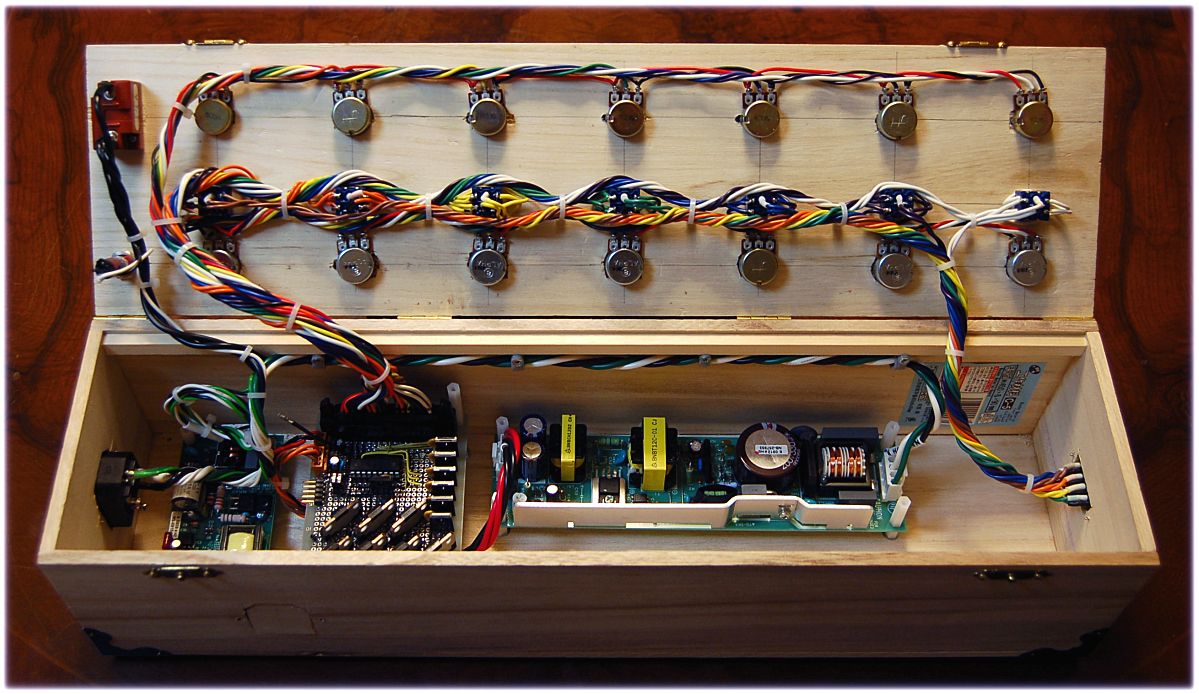
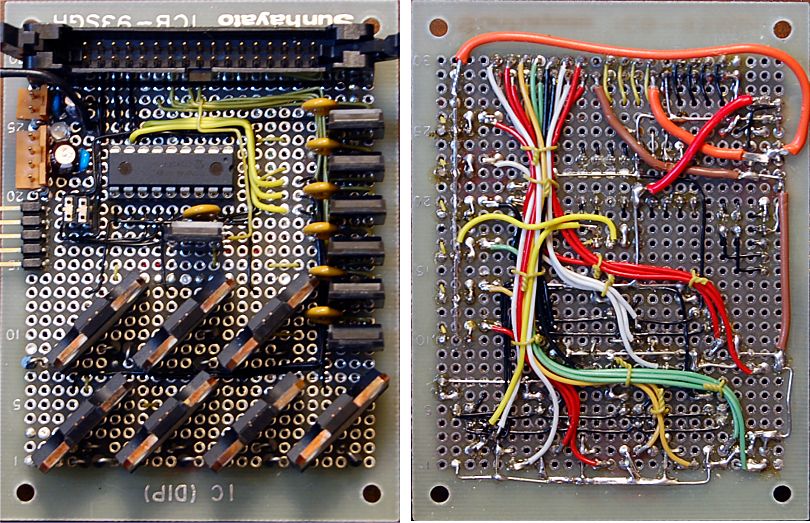
本当は倍の面積の基板に、余裕を持って発熱素子を実装するつもりでしたが、手元にこの基板が有ったので使ってしまいました。
部品は載っても手配線なので、配線には苦労しました。部品の交換や手直しはやりたくないです。
何事も余裕を持って行う事が大事ですね。反省 (- -;)
・電源はモーター用にBNB12SA-U(12V/4.3Aイータ電機),ロジック用にBNS05SA-U(5V/2Aイータ電機)を使用しました。
別売りのハーネスとともに秋葉原の千石電商で買いました。
回路図にはパスコンがたくさん入っていますが、上の画像の基板ではスペースの関係上かなり省略しています。
回路図(GIF) 回路図(PDF)
@0@7との接続
接続ケーブルは、0.3sqx14芯/3m:板東電線)を秋葉原のオヤイデ電気で購入しましたが、長すぎるので1.5mにしました。
しかーし、@0@7側のコネクタボックスは左側、パワーパックのコネクタは右側......使いにくい...失敗しました。orz
当初、何も考えずにACケーブルのインレットを手前側面に取り付けましたが、基板と接近しすぎて基板の取り外しが困難なため左側面に移動したのです。
信号ケーブルを左側面、ACケーブルを右側面にすべきでした。
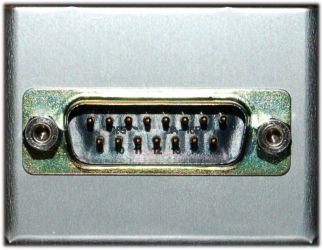
コネクタはD-SUBの15pinです。


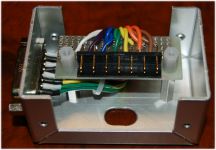
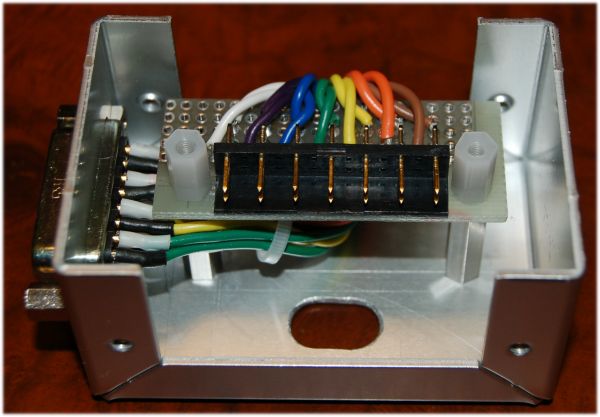
@0@7側のコネクタボックスです。
D-SUBの15pinをライトアングルコネクタに変換してフィーダー用コネクタと接続します。
このライトアングルコネクタは2.54mmピッチのものを、1列おきにピンを引き抜いて5.08mmピッチに加工しています。
これで、トミックスのフィーダー用コネクタを簡単な加工で挿す事が出来ます。
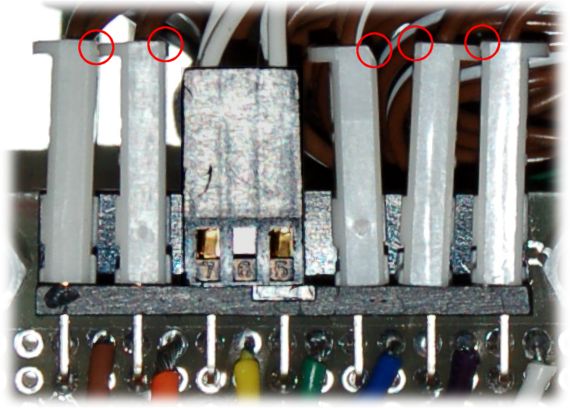
ヘッダ側を5.08mmピッチに加工しましたが、まだフィーダー用コネクタの付け根のツバが干渉してしまいますので、片側をニッパで切り落としました。
フィーダは線路に挿す向きによって極性が変わりますが、片側のツバを切り取る事で極性を見分け易くなりました。
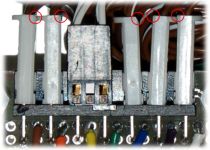
Z用線路は専用フィーダを使わず、線路に電線を直接ハンダ付けしました。
コネクタ側は航空電子のPSコネクタのハウジングを6Pに切断して2本の線路を1つのコネクタにまとめて使用しました。


Nゲージにもどる







{kind=link}
{kind=link}